測向是了解接收信號的傳輸方向的實踐. 它支持系統中的所有內容, 從追踪野生動物到航空和航海. 藍牙在其最新的藍牙中添加了新的可選測向核心規範 5.1. 這項新功能使藍牙設備能夠知道從另一個藍牙設備廣播的任何信號的方向. 它還能夠並且可以從根本上增強藍牙定位服務解決方案. 測向功能支持兩種技術. 這些技術是; 藍牙 AoA (到達角) 和藍牙 AoD (離去角).
在MOKOBlue, 我們創建並提供多個 藍牙信標 支持新藍牙測向功能,多樣化設計自主開發. 我們的團隊致力於根據客戶需求開發和定制各種硬件和軟件設計.
到達角和離開角的工作原理
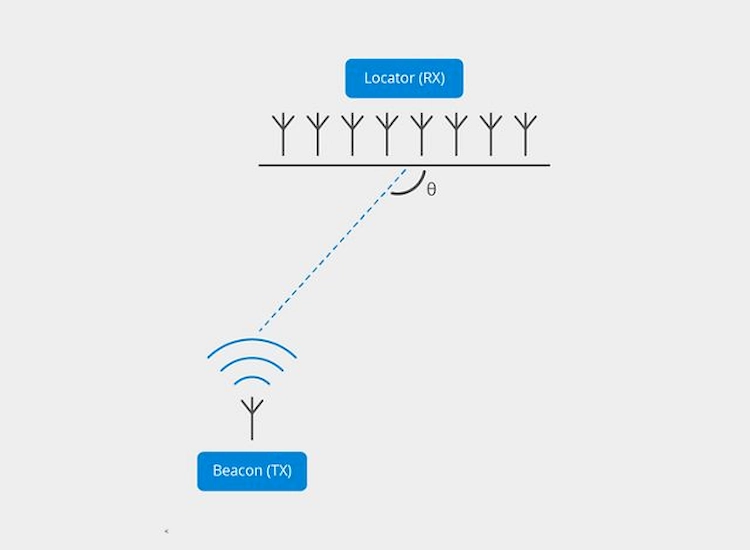
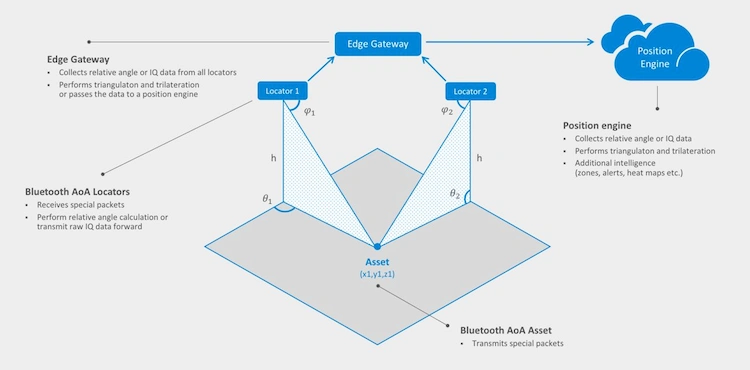
到達角 (協議書)
- 資產廣播(TX) 它的位置 協議書 定位器, 例如無線接入點 (美聯社), 連接燈, 或智能燈具
- 定位器測量信號到達的角度
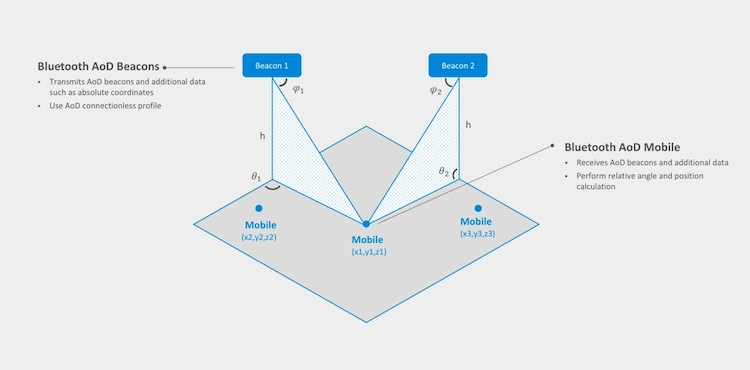
出發角(AOD)
- 信標傳輸 AoD 信息, 比如坐標, 通過多個天線
- 移動設備, 包括智能手機, 接收信標併計算其位置
藍牙 AoA 的設計注意事項 (到達角)
• 只需要一根天線. 它可以是低功耗的,同時支持BLE的其他功能
• 僅有的 4 X 4 或者 3 X 3 定位器需要開關和天線射線
• 所有角度讀數均由藍牙 AoA 處理 網關. 他們還通過與雲中的資產管理系統通信來確定設備的位置
藍牙 AoD 的設計注意事項 (出發角)
• 僅有的 4 X 4 或者 3 X 3 信標需要開關和天線射線
• 智能手機等設備必須支持 AoD 算法
• 定位服務系統必須熟悉信標的坐標
新藍牙測向功能的解決方案
除了定位和關鍵接近應用, 藍牙測向功能還有其他解決方案. 他們包括;
項目查找解決方案
在用戶體驗中, 物品查找解決方案經歷了相當大的顛簸. 當智能手機賣家在他們的手機中加入藍牙 AoA 測向功能時, 項目查找解決方案可以控制方向數據. 這意味著他們不僅能夠確定錯放物品的接近程度, 但他們也會知道它的確切位置. 因此, 藍牙測向功能消除了尋找丟失物品時的必要假設.
實時定位系統解決方案
當部署在正確的環境中時,RTLS 解決方案可以實現測向功能,以將位置的藍牙 AoA 精度提高到厘米級. 具有測向功能的 RTLS 使工廠能夠以更高的精度輕鬆跟踪材料的位置和流動. 而且, 它還會在員工接近危險的工作區域時提醒他們.
PoI信息解決方案
將藍牙 AoA 測向功能添加到智能手機時, PoI 信息解決方案主要受益於此. 例如, 博物館中帶有相關信標的各種展品可以使用 PoI 信息應用程序. 用戶可以通過智能手機訪問 PoI 信息應用程序,了解房間內所有可用的展品. 該應用程序允許用戶選擇最有機會的展覽以接收有關該特定展覽的額外信息. 用戶只需將智能手機指向特定展品,即可使用測向支持獲取有關特定項目的更多信息.
IPS 解決方案
測向功能也應用於 IPS 解決方案. 例如, 在定位系統中, 新的藍牙方向功能可用於在大型體育場的座位上為球迷導航. 具有測向功能的 IPS 解決方案需要更少的定位信標來獲得更高的精度. 這為部署帶來了額外的有效性. 而且, 達到的準確性提供了增量信息以及對消費者和產品交互的理解.
藍牙 5.1 AoA 位置服務實現理論
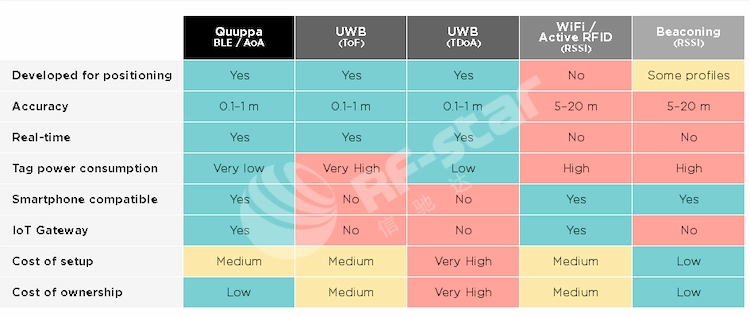
室內定位技術總結
室內定位有幾種解決方案. 他們包括; 超寬帶, 無線上網, BLE信標, 和 BLE AoA. UWB 的精度範圍為 0.1m 到 1m, 而 Wi-Fi 和 BLE 信標有較大的誤差. 它們的精度範圍在 5m 到 20m 之間.
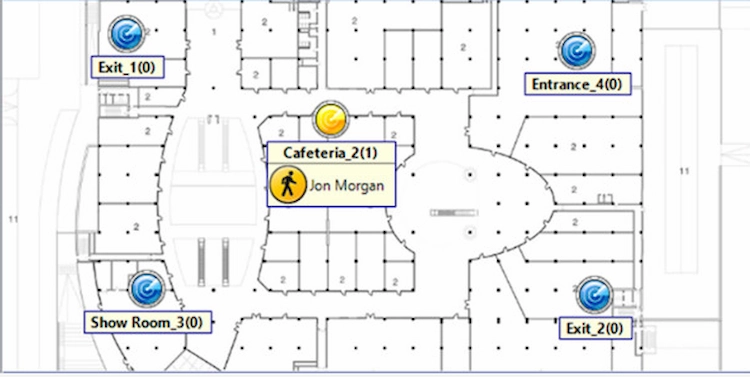
室內定位理論分析
室內定位系統繪製真實場景的建築造型, 在室內位置設置接收路由器, 並在建模圖上標註匹配位置. 所有無線信號都通過智能手機或信標模塊傳輸. 收到無線信號後, 安裝在固定點的接收路由器驗證信標的位置區域範圍.
確認其位置區域範圍後, 各種天線可以測量信標的信號到達角. 這可以通過結合信標的準確位置和三角定位來計算.
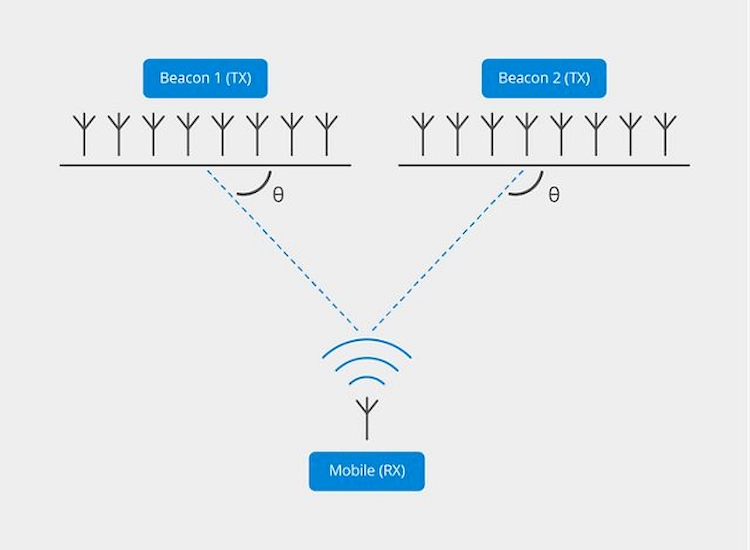
三角測量
三角測量是指使用兩個 AoA 數據集測量信標的位置. 可以使用兩組天線測量一個 AoA 數據. 另一方面, 可以使用兩組 AoA 數據來測量設備的位置.
測量理論
頻率
藍牙設備中的 ISM 頻段從 2.40 GHz到 2.41 兆赫. 藍牙有 3 廣播頻道包括 37, 38, 和 39. 在藍牙 v5.x 的核心規範中, 廣泛的低功耗藍牙廣播可以從任何頻道傳輸 0 至 39. 因此, 所有帶有藍牙版本的信標 5.1 可以在任何藍牙通道上有效運行.
階段
所有無線信號在空中都是連續的. 在頻率範圍內, RX接收機反向調製,採集0~2π波週期的信號.
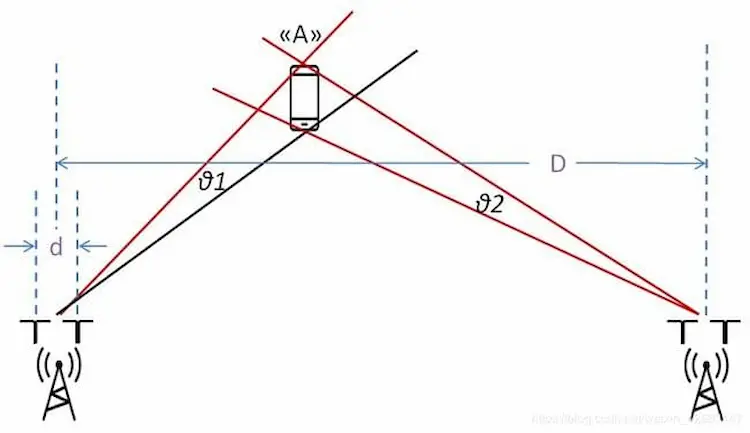
AoA 計算
想像一下,當固定頻率的 BLE 信標信號在開放空間中傳輸時. 當接收器在同一半徑上並且在特定時間 TX 結束時,RX 接收到零相位差. 儘管如此, 當 RX 接收器位於半徑不兼容的位置時,獲取相位接收器, 在特定時間.
AoA 測量誤差
二維平面有兩個角, 但是在實際的三維坐標中有一個半徑為α的圓軌跡. 儘管 AoA 接收器在圓的軌跡上時知道信標的信號, 它無法確定他們是否在圈子上. 在這段時間, 信標的坐標定位點由正交天線陣確定.
通過定位和減少部署的接收器數量來設置天線陣列. 下面是使用藍牙 AOA 開發套件部署標準天線陣列的示意圖.
在藍牙中部署 AoA 軟件 5.1
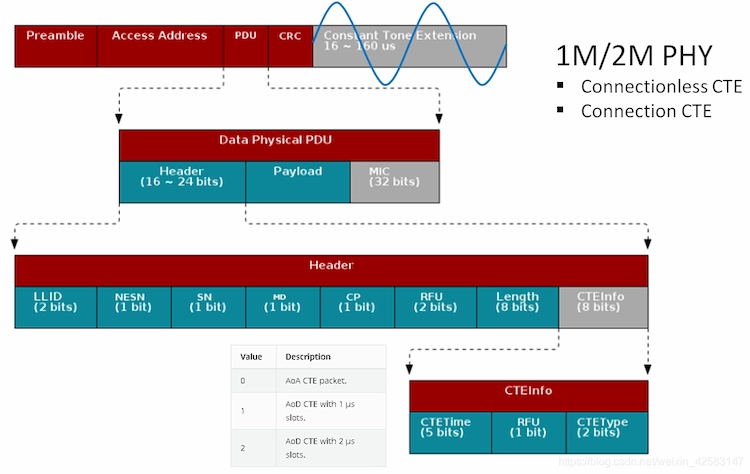
藍牙 5.1 在邏輯鏈路層使用 AoA 協議規範開發. 到達角和出發角可以同時支持廣播和連接模式,工作在1M或2M常規PHY下. 以下是數據傳輸格式的要求
• PDU 數據包具有標準化的 AoA/AoD 規範
• CTE 是 AoA/AoD 數據包擴展, 它的周期是 16 微秒—— 160 微秒.
• 的信號調製 250 kHz 可在沒有 CRC 驗證和白化的載波上使用.
• RX 接收器使用信號計算相位差並在特定時間對信號 I/Q 值進行採樣.
藍牙 AoA 設計的挑戰
信號反射干擾
真實場景中的接收機 RX 接收其反射信號或其他到達角和信標信號的反射信號. 而且, CTE 擴展的數據包由反射信號攜帶,儘管必須首先消除噪聲信號.
補償切換時間
各種TF天線由RF核心控制. 除了在空中的信號傳輸時間, 必須始終補償 RF 的切換時間.
角度值誤差
由於測量必須有誤差,因此需要一種算法來最小化誤差. 大多, 誤差範圍介於 3% 〜 5%.
最大化藍牙 AoA 精度的技巧
藍牙到達角 (協議書) 使用到達不同天線的信號的相位差計算出信標的方位角和仰角. 物理方面和傳輸信號的過程會影響 AoA 的準確性. 這種精度從幾厘米到一米左右不等.
最大化藍牙 AoA 精度的一些策略是;
一種) 始終使金屬物體遠離定位器. 通過在定位器上方添加框可以實現更高的準確性. 這樣做是為了遠離定位器附近的任何金屬物體.
b) 在信標的每一側安排定位器. 必須在信標的所有側面均勻分佈定位器. 當信標和定位器之間存在大角度時,精度會降低.
C) 當信標和定位器位置接近時,可獲得最佳精度. 始終將定位器放在高高的天花板上以獲得更好的準確性. 還, 記住不要將定位器放得太遠,因為當定位器和信標之間存在大角度時,可能會導致精度降低.
d) 在 X 中, 是, 和 Z 位置, 在 Z 軸上實現最差的精度,因為所有定位器通常放置在相似的高度.
Ë) 當定位器和信標之間存在視線時,可以獲得更高的準確性. 考慮將信標放置在貨盤負載和屋頂或天花板上的定位器等物品的頂部,以在兩者之間形成視線.
F) 在確切位置添加額外的定位器以創建更多位置角度. 這些位置角度可用於計算信標位置的改進精度.
G) 您還可以隨時間過濾以平均更多數據. 這是可以在不強調定位引擎的情況下實現的, 儘管在接收位置更新時延遲會增加.
H) 準確性的變化取決於信標的方向. 在受控場景中, 您可以考慮安排和固定信標的方向,以提高特定方向的準確性.
一世) 必須進行準確的場地和錨點測量——由於初始測量不准確而導致精度低.
MOKOBlue 藍牙 AoA 定位技術的優勢
• 它們的平均準確度介於 0.1 至 0.5 米
• 它們將初始藍牙低精度的 5 米精度提高了幾乎 10 次
• 刷新率高
• 這些技術支持藍牙版本 5.1
• 它們與信標等各種藍牙標籤兼容, 智能手機, 手錶, 手鐲, 和許多其他人
• 耗電量低
• 具備下行廣播和物聯網主播能力
MOKOBlue 信標產品特點
1. 北歐 nRF52 系列 SoC
2. 支持藍牙版本 4.2
3. 兼容藍牙版本 5
4. 兼容 Google Eddystone 和 Apple iBeacon
5. 適用於 Arduino 藍牙 iOS
6. 擁有獨特的 SDK 和 APP 配置
MOKOBlue 提供的一些藍牙信標是;
一種) H6 Light Sensor Beacon – 採用超聲波焊接結構組裝而成,兼容標準藍牙版本 4.2. 除了, 它集成了一個 3 軸加速度計和光傳感器. H6 光傳感器信標是 POI 信息解決方案的最理想選擇.
b) W6 藍牙腕帶信標——這款藍牙腕帶信標與標準藍牙版本兼容 5.1. 它專為物品查找解決方案等用例而構建, 流量管理, 等等.
C) H7 Helmet Beacon – 這是一款耐用的 BLE 信標,具有 IP67 高防水等級. 信標防震且耐高溫. 因此, 它是 RTLS 解決方案的有效應用,因為它可以在惡劣的環境中工作, 比如倉庫, 工廠, 隧道, 建築工地, 和更多.
d) M1 Coin Beacon Tag – 這是一款小巧便攜的藍牙信標標籤硬件,重量輕 5.4 克. 而且, 它採用可選的 3 軸加速度計傳感器構建,使其能夠分析用戶的行為. M1投幣信標標籤是IPS解決方案的最佳選擇.