A busca de direção é a prática de conhecer a direção de transmissão de um sinal recebido. Ele suporta tudo em um sistema, do rastreamento da vida selvagem à aviação e navegação náutica. O Bluetooth adicionou a nova especificação principal opcional de localização de direção em seu mais recente Bluetooth 5.1. Este novo recurso permite que os dispositivos Bluetooth saibam a direção de qualquer sinal transmitido de outro dispositivo Bluetooth. Também é capaz e pode melhorar radicalmente as soluções de serviços de localização Bluetooth. O recurso de localização de direção suporta duas técnicas. Essas técnicas são; o Bluetooth AoA (ângulo de chegada) e o Bluetooth AoD (ângulo de partida).
Na MOKOBlue, criamos e fornecemos vários Beacons Bluetooth que suportam os novos recursos de localização de direções Bluetooth com designs diversificados para desenvolvimento independente. Nossa equipe se dedica a desenvolver e personalizar diversos projetos de hardware e software de acordo com as necessidades do cliente.
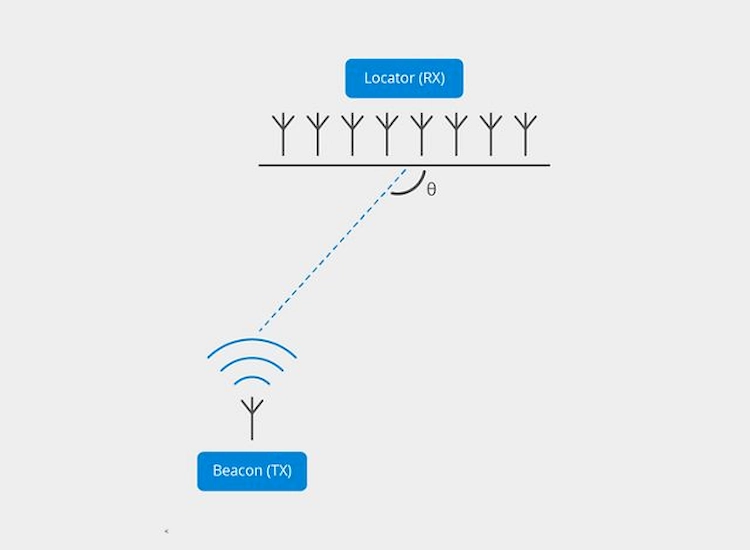
O princípio de funcionamento do ângulo de chegada e ângulo de partida
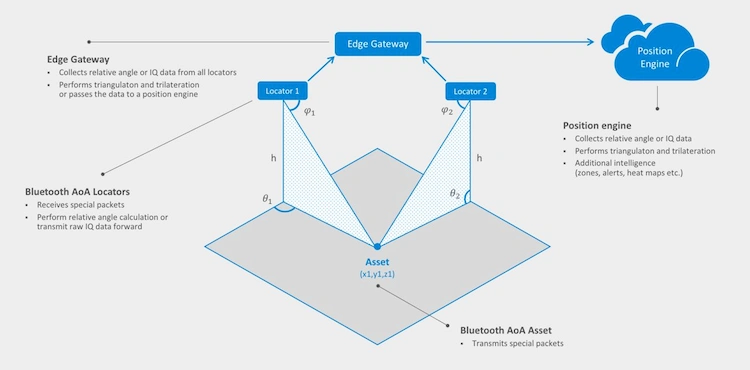
Ângulo de chegada (AoA)
- Um ativo é transmitido(TX) sua localização para um AoA localizador, como um ponto de acesso sem fio (AP), luz conectada, ou luminária inteligente
- O localizador mede o Ângulo de chegada do sinal
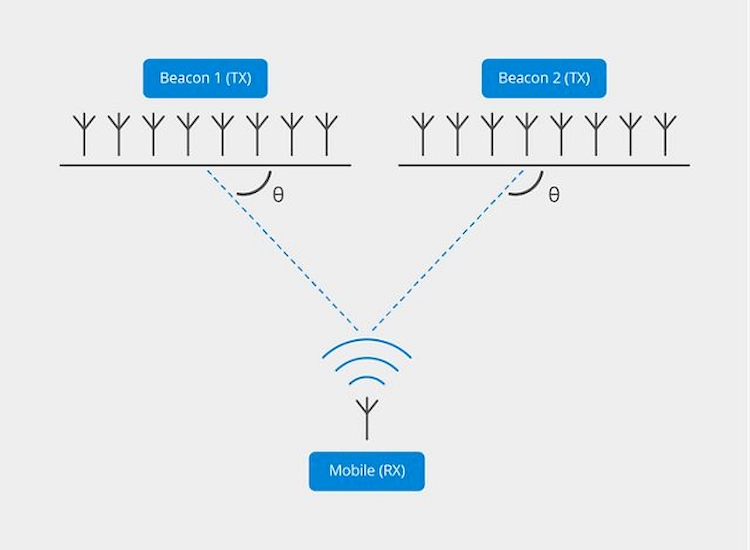
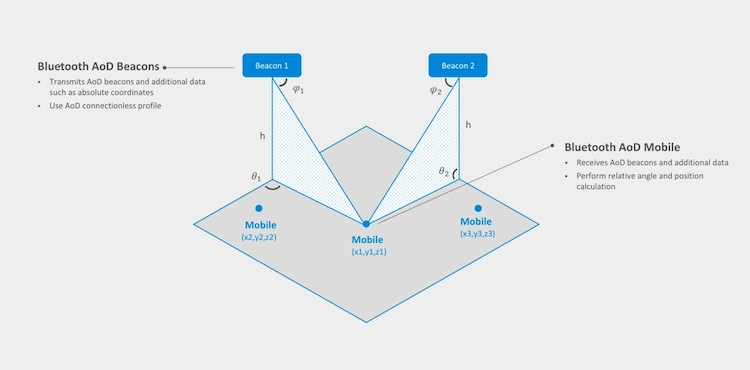
Ângulo de partida(AOD)
- Beacons transmitem informações AoD, como coordenadas, através de várias antenas
- Dispositivos móveis, incluindo smartphones, receba os beacons e calcule sua localização
Considerações sobre projetos de Bluetooth AoA (Ângulo de chegada)
• Apenas uma única antena é necessária. Pode ser de baixa potência e simultaneamente suporta outras funcionalidades do BLE
• Apenas 4 x 4 ou 3 x 3 interruptores e raios de antena são necessários para os localizadores
• Todas as leituras de ângulo são processadas pelo Bluetooth AoA entradas. Eles também determinam a localização do dispositivo por meio da comunicação com um sistema de gerenciamento de ativos na nuvem
Considerações sobre projetos de Bluetooth AoD (Ângulo de partida)
• Apenas 4 x 4 ou 3 x 3 interruptores e raios de antena são necessários pelos beacons
• Os algoritmos AoD devem ser suportados por dispositivos como smartphones
• O sistema de serviços de localização deve estar familiarizado com as coordenadas do farol
Soluções do novo recurso de localização de direção Bluetooth
Além de aplicações de posicionamento e proximidade chave, o recurso de localização de direção Bluetooth também tem outras soluções. Eles incluem;
Soluções de localização de itens
Na experiência do usuário, as soluções de localização de itens experimentam um aumento considerável. Quando os vendedores de smartphones incorporam um recurso de localização de direção Bluetooth AoA em seus telefones, as soluções de localização de itens podem controlar os dados direcionais. Isso implica que eles não apenas serão capazes de determinar a proximidade de um item extraviado, mas eles também saberão sua localização exata. Assim, o recurso de localização de direção Bluetooth elimina o requisito de suposição ao procurar itens perdidos.
Soluções RTLS
As soluções RTLS podem implementar o recurso de localização de direção para aprimorar a precisão do Bluetooth AoA de um local até o nível do centímetro quando implantado no ambiente certo. O RTLS com um recurso de localização de direção permite que uma fábrica rastreie facilmente a posição e o fluxo de materiais com precisão aprimorada. além disso, também alerta os funcionários sempre que se aproximam de zonas de trabalho perigosas.
Soluções de informações de PoI
Quando o recurso de localização de direção Bluetooth AoA é adicionado a smartphones, as soluções de informações de PoI se beneficiam principalmente. Por exemplo, várias exposições com sinalizadores associados em um museu podem usar o aplicativo de informações de PoI. Os usuários podem acessar o aplicativo de informações PoI de seus smartphones e conhecer todas as exposições disponíveis em uma sala. O aplicativo permite que o usuário selecione a exposição mais oportunista para receber informações extras sobre aquela determinada exposição. Os usuários podem usar o suporte de localização de direção para obter mais informações sobre um item específico, apenas apontando seus smartphones para essa exposição específica.
Soluções IPS
O recurso de busca de direção também é aplicado em soluções IPS. Por exemplo, em sistemas de posicionamento, o novo recurso de direção Bluetooth pode ser usado para orientar os torcedores em um grande estádio diretamente em seus assentos. As soluções IPS com o recurso de localização de direção requerem menos sinalizadores de localização para obter melhor precisão. Isso traz eficácia adicional às implantações. além disso, a precisão alcançada fornece informações incrementais e uma compreensão da interação do consumidor e do produto.
Bluetooth 5.1 Teoria de Realização de Serviço de Localização AoA
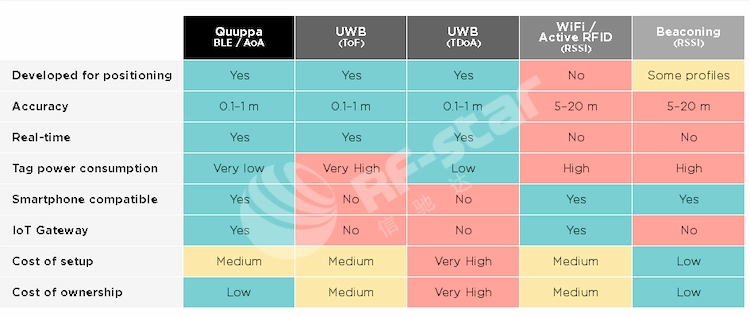
Resumo da Tecnologia de Posicionamento Interno
O posicionamento indoor tem várias soluções. Eles incluem; UWB, Wi-fi, Sinalizador BLE, e BLE AoA. UWB tem uma faixa de precisão de 0,1 m a 1 m, enquanto os beacons Wi-Fi e BLE têm um erro maior. Sua faixa de precisão é entre 5m a 20m.
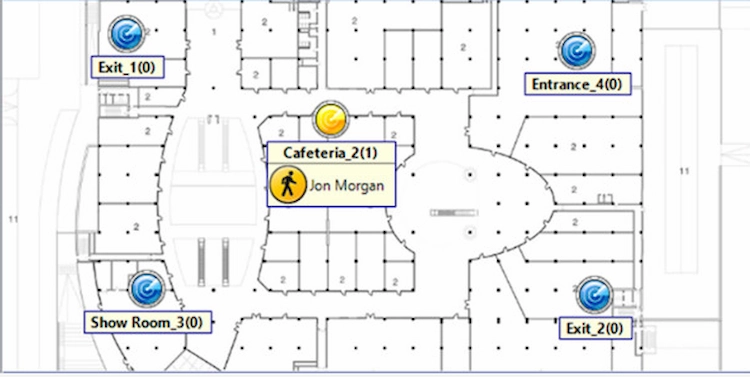
Análise da Teoria de Posicionamento Interno
O sistema de posicionamento interno desenha a modelagem arquitetônica de uma cena real, configura o roteador do receptor no local interno, e marca a posição correspondente no mapa de modelagem. Todos os sinais sem fio são transmitidos através de um smartphone ou um módulo de beacon. Depois de receber os sinais sem fio, o roteador receptor instalado em um ponto fixo autentica o alcance da área de posição da baliza.
Depois de confirmar sua faixa de área de posição, várias antenas podem medir o ângulo de chegada do sinal do farol. Isso pode ser calculado combinando a posição precisa do farol e o posicionamento da triangulação.
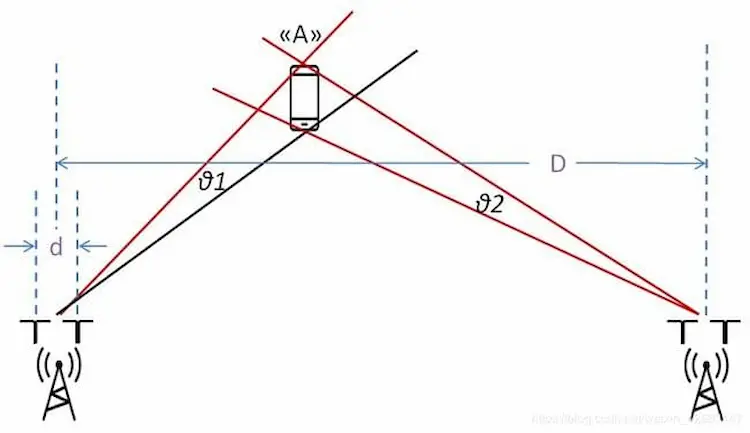
Triangulação
A triangulação refere-se à medição da posição de um farol usando dois conjuntos de dados AoA. Um dado AoA pode ser medido usando dois conjuntos de antenas. Por outro lado, a posição de um dispositivo pode ser medida usando dois conjuntos de dados AoA.
Teoria da Medição
Frequência
A banda ISM em dispositivos Bluetooth começa a partir 2.40 GHz para 2.41 GHz. Bluetooth tem 3 canais de transmissão que incluem 37, 38, e 39. Nas especificações principais do Bluetooth v5.x, a ampla transmissão Bluetooth Low Energy pode ser transmitida em qualquer canal de 0 para 39. Assim, todos os beacons com versão Bluetooth 5.1 pode funcionar efetivamente em qualquer canal Bluetooth.
Estágio
Todos os sinais sem fio são contínuos no ar. Na faixa de frequência, o receptor RX reverte a modulação e coleta o sinal de um ciclo de onda de 0~2π.
Cálculo AoA
Imagine quando um sinal de beacon BLE de frequência fixa está transmitindo em um espaço aberto. O RX recebe uma diferença de fase nula quando os receptores estão no mesmo raio e o TX termina durante um determinado tempo. no entanto, um receptor de fase é adquirido quando o receptor RX está em uma posição com um raio incompatível, durante um determinado momento.
Erro de medição AoA
Existem dois ângulos de um plano bidimensional, mas há uma trajetória circular com um raio de α em coordenadas tridimensionais reais. Embora o receptor AoA conheça o sinal de um farol quando está na trajetória do círculo, não pode determinar se eles estão no círculo ou não. Durante este tempo, o ponto de localização coordenada do farol é confirmado por uma matriz de antenas ortogonais.
As matrizes de antenas são definidas por meio do posicionamento e da redução do número de receptores implantados. Abaixo está uma ilustração da implantação de matrizes de antenas padrão com um kit de desenvolvimento Bluetooth AOA.
Implantação do software AoA em Bluetooth 5.1
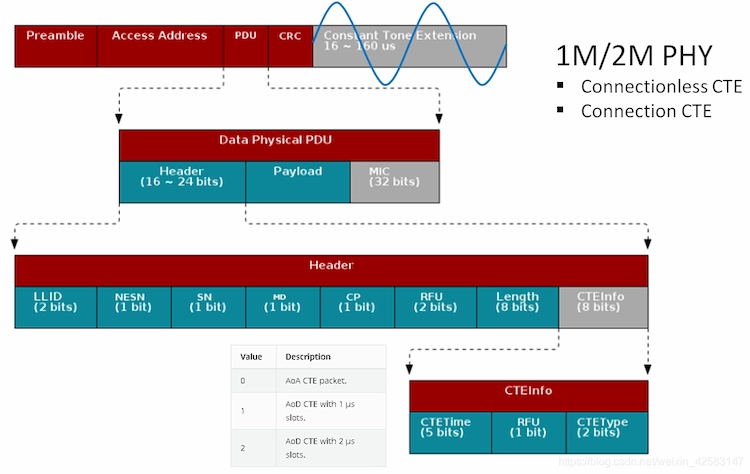
Bluetooth 5.1 é desenvolvido com especificações de protocolo AoA na camada de enlace lógico. O ângulo de chegada e o ângulo de partida podem suportar os modos de transmissão e conexão e funcionar sob PHY regular de 1M ou 2M. A seguir estão os requisitos do formato de transmissão de dados
• Um pacote de dados PDU tem especificações AoA/AoD padronizadas
• O CTE é a extensão do pacote de dados AoA/AoD, e seu período é 16 µs – 160 μs.
• A modulação do sinal de 250 kHz está disponível em uma onda portadora sem validação e clareamento CRC.
• O receptor RX usa um sinal para calcular a diferença de fase e amostrar o valor de I/Q do sinal em um horário específico.
Desafios dos projetos Bluetooth AoA
Interferência de Reflexão de Sinal
O receptor RX em uma cena real recebe seu sinal de reflexão ou de outros ângulos de chegada e sinais de farol. além disso, Os pacotes de dados estendidos por CTE são transportados pelo sinal de reflexão, embora os sinais de ruído devam ser eliminados primeiro.
Tempo de comutação de compensação
Várias antenas TF são controladas pelo núcleo de RF. Além do tempo de transmissão do sinal no ar, o tempo de comutação de RF deve sempre ser compensado.
Erro de valor de ângulo
Um algoritmo é necessário para minimizar o erro, uma vez que as medições devem ter um erro. Majoritariamente, o intervalo de erro está entre 3% ~ 5%.
Dicas para maximizar a precisão do Bluetooth AoA
Ângulo de chegada do Bluetooth (AoA) calcula o azimute e os ângulos de elevação do farol usando a diferença de fase de um sinal atingindo várias antenas. Aspectos físicos e o processo de transmissão de sinais afetam a precisão do AoA. Esta precisão varia de alguns centímetros a cerca de um metro.
Algumas das estratégias para maximizar a precisão do Bluetooth AoA são;
uma) Mantenha sempre objetos metálicos longe dos localizadores. Melhor precisão pode ser alcançada adicionando boxing acima dos localizadores. Isso é feito para afastar quaisquer objetos de metal perto dos localizadores.
b) Organize os localizadores em todos os lados de um farol. É essencial ter localizadores uniformemente espaçados em todos os lados da baliza. A baixa precisão é percebida quando há um grande ângulo entre o farol e o localizador.
c) A melhor precisão é alcançada quando o sinalizador e o localizador estão posicionados próximos. Sempre baixe os localizadores com tetos altos para obter melhor precisão. Além disso, lembre-se de não deixar os localizadores muito longe, pois uma precisão ruim pode ser percebida quando há um grande ângulo entre o localizador e o sinalizador.
d) Entre os X, E, e Z locais, a pior precisão é realizada no eixo Z, uma vez que todos os localizadores são frequentemente colocados em alturas semelhantes.
e) Melhor precisão é alcançada quando existe uma linha de visão entre o localizador e o farol. Considere colocar sinalizadores em cima de itens como cargas de paletes e localizadores no telhado ou no teto para criar uma linha de visão entre os dois.
f) Adicione localizadores extras no local exato para criar mais ângulos de localização. Esses ângulos de localização podem ser usados para calcular uma precisão aprimorada da posição do farol.
g) Você também pode filtrar ao longo do tempo para obter a média de mais dados. Isso é possível sem sobrecarregar o mecanismo de localização, embora a latência seja aumentada ao receber atualizações do local.
h) A variação na precisão depende da orientação de um farol. Em cenários controlados, você pode considerar organizar e corrigir a orientação de um farol para aumentar a precisão em uma direção específica.
eu) É essencial ter uma medição precisa do local e da âncora - baixa precisão é alcançada devido a medições iniciais imprecisas.
Vantagens das tecnologias de posicionamento Bluetooth AoA da MOKOBlue
• Eles têm uma precisão média entre 0.1 para 0.5 metros
• Eles melhoram a precisão de 5 metros do Bluetooth de baixa precisão inicial em quase 10 vezes
• Eles têm uma alta taxa de atualização
• Essas tecnologias suportam a versão Bluetooth 5.1
• Eles são compatíveis com várias tags Bluetooth, como beacons, smartphones, relógios, pulseiras, e muitos outros
• Eles consomem baixa energia
• Eles têm os recursos de transmissão de downlink e âncora de IoT
Características do produto MOKOBlue Beacons
1. SoC nórdico da série nRF52
2. Suporta versão Bluetooth 4.2
3. Compatível com a versão Bluetooth 5
4. Compatível com Google Eddystone e Apple iBeacon
5. Disponível para Arduino Bluetooth iOS
6. Possui configurações exclusivas de SDK e APP
Alguns dos beacons Bluetooth disponíveis na MOKOBlue são;
uma) H6 Light Sensor Beacon – É montado com estrutura de soldagem ultrassônica e é compatível com a versão padrão Bluetooth 4.2. além do mais, é integrado com um acelerômetro de 3 eixos e sensores de luz. O farol do sensor de luz H6 é o mais ideal para soluções de informações de POI.
b) W6 Bluetooth Wristband Beacon – Este sinalizador de pulseira Bluetooth é compatível com a versão padrão Bluetooth 5.1. É construído especialmente para casos de uso, como soluções de localização de itens, gerenciamento de fluxo, etc.
c) H7 Helmet Beacon – É um farol BLE durável com um alto nível à prova d'água de IP67. O farol é à prova de choque e resistente a altas temperaturas. Conseqüentemente, é uma aplicação eficaz para soluções RTLS, pois pode trabalhar em ambientes hostis, como armazéns, fábricas, túneis, canteiros de obras, e mais.
d) M1 Coin Beacon Tag – É um pequeno e portátil hardware de tag beacon Bluetooth que pesa 5.4 gramas. além disso, é construído com um sensor de acelerômetro de 3 eixos opcional que permite analisar o comportamento do usuário. A etiqueta sinalizadora de moedas M1 é a melhor escolha para soluções IPS.