Le système de positionnement a pénétré dans tous les aspects de notre vie, parmi lesquelles la technologie de navigation par satellite et de données géographiques est la technologie de positionnement la plus mature. toutefois, ces technologies sont plus adaptées à une utilisation dans un environnement extérieur ouvert en raison du bloc de matériaux de construction intérieurs, ce qui se traduit par un mauvais signal, c'est pourquoi le système de positionnement intérieur a vu le jour. Il existe une variété de systèmes de positionnement intérieur, dont chacun a sa propre industrie d'application appropriée et Bluetooth est utilisé dans une variété d'industries et est considéré comme l'un des futurs des systèmes IoT IPS. Dans cet article, vous apprendrez ce qu'est IPS, quels types de système de positionnement intérieur sont couramment utilisés, pourquoi vous devriez choisir Bluetooth IPS, et comment vous pouvez les mettre en œuvre.
Qu'est-ce qu'un système de positionnement intérieur?
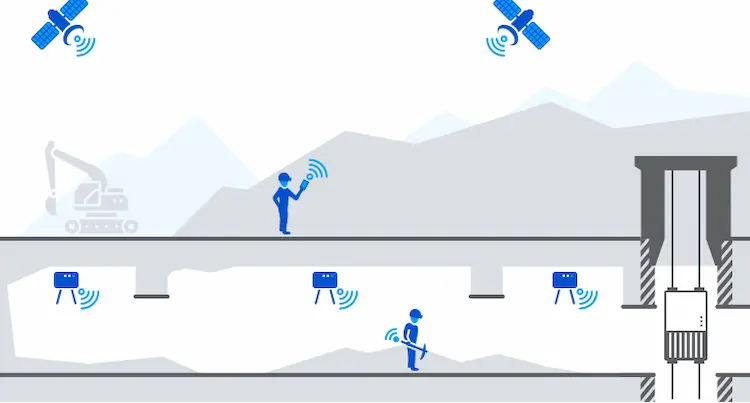
Le système de positionnement intérieur fait référence au réseau d'équipements qui peut localiser des personnes ou des objets dans l'environnement intérieur. Il se compose généralement de deux éléments distincts: balises d'ancrage et de position. L'ancre est un appareil, comme une balise ou un relais, placé stratégiquement dans un espace défini. Les balises sont portées par des personnes ou des objets. Anchor localise activement l'appareil mobile et le tag, ou fournit un emplacement ou un contexte d'environnement pour que l'appareil soit conscient de.
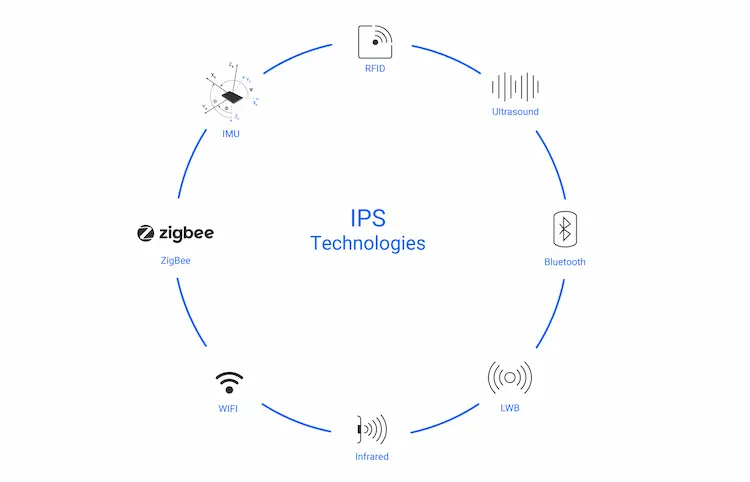
8 types d'IPS ( système de positionnement intérieur)
Il existe différents IPS sur le marché. Nous avons listé 8 technologies de positionnement intérieur couramment utilisées en fonction de leurs types de signaux, dont la technologie Rf est la plus utilisée.
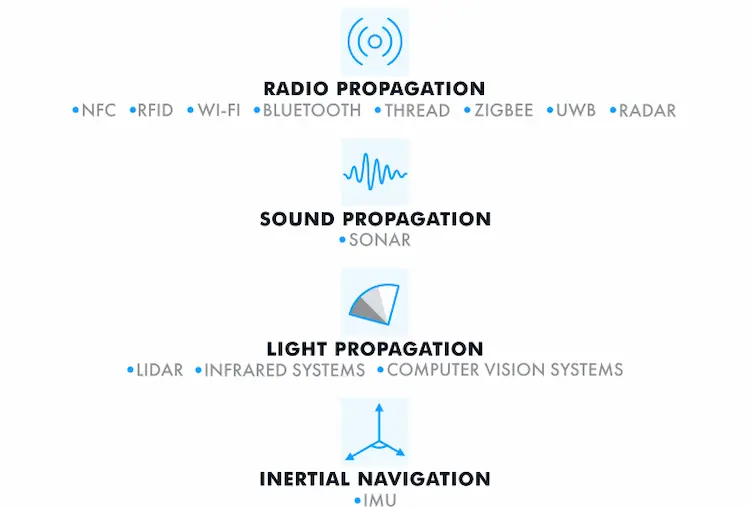
Fréquence radio
Les technologies RF courantes incluent la RFID, WIFI, Bluetooth, Zigbee, et UWB. Basé sur les signaux RF, la position d'une cible est détectée à l'aide de signaux radio transmis d'un émetteur à un récepteur.
WIFI & Bluetooth
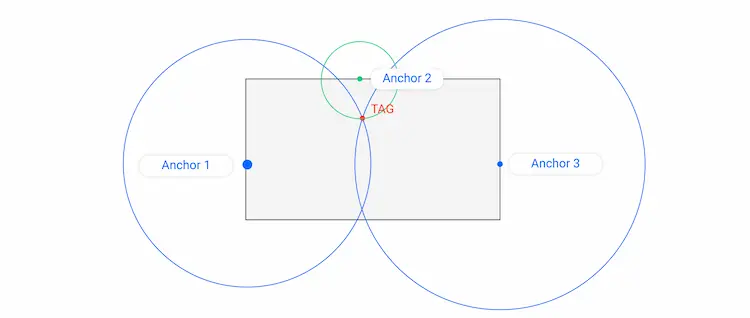
Le Wi-Fi et le Bluetooth peuvent fonctionner sur la base de l'infrastructure réseau existante. Il est facile à installer et peu coûteux. Son principe de fonctionnement principal implique l'utilisation de la force du signal reçu (RSS), qui dépend de la distance entre l'expéditeur et le destinataire. Trois mesures peuvent être utilisées pour calculer l'emplacement des appareils mobiles en mesurant simplement le RSS d'une balise vers plusieurs balises Bluetooth ou points d'accès Wi-Fi.
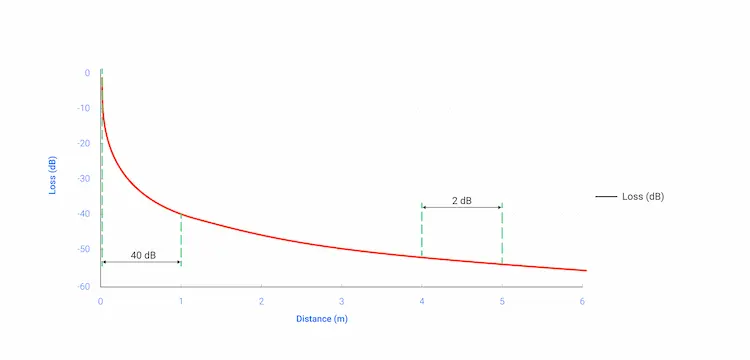
Différents matériaux ont des effets différents sur les signaux Wi-Fi et Bluetooth, ce qui affecte la précision des signaux. Pour surmonter ce problème, certains IPS créent des cartes RSS de zones spécifiques basées sur des étalonnages spécifiques. Leur précision IPS peut être de 1 à 2 m.
Bien que leurs principes de base soient les mêmes, ils sont différents sur certains points. D'une part, Le WIFI offre une grande couverture tout en consommant beaucoup d'énergie. D'autre part, Bluetooth IPS consomme moins d'énergie mais la couverture est relativement faible. Bluetooth 4.0 a une portée maximale idéale de 100 m débits de données élevés (jusqu'à 2.1 Mbps), alors que BLE n'a qu'environ 60 m LOS et un débit de données considérablement réduit (125kbps).
RFID
Les champs électromagnétiques sont utilisés pour identifier et suivre les étiquettes attachées aux objets et aux êtres humains. La RFID est une technologie d'identification sans contact, il envoie et reçoit des signaux radiofréquence allant de 125KHz à 5.8ghz. Les lecteurs et les étiquettes RFID formaient le système. La RFID est divisée en trois types, qui sont des RFID passives, RFID semi-passif, et RFID active.
Le lecteur envoie des impulsions au tag passif, quelle réponse à la demande du lecteur en renvoyant des informations d'identification.
- Les balises passives sont bon marché mais ne peuvent stocker que quelques kilo-octets de mémoire, et le lecteur ne peut pas obtenir plus d'un mètre d'information.
- L'antenne et la fonction globale de la RFID semi-passive sont similaires à la RFID passive, avec des balises alimentées par batterie et d'autres fonctions simples.
- La RFID active peut fournir une gamme d'environ 100 mètres et peut stocker plus d'informations, mais ça coûte aussi plus cher.
La RFID n'a pas besoin de systèmes infrarouges, il ne fournit pas non plus d'informations de suivi, et ils peuvent être dérangés dans des environnements où il y a du liquide, métal, ou d'autres sources d'interférences radio.
Zigbee
Zigbee est une norme de réseau maillé sans fil à faible consommation d'énergie et à faible coût pour les appareils alimentés par batterie utilisés dans les applications de contrôle et de surveillance sans fil. Il se compose de quatre composants supplémentaires: couche d'application, ZDO, couche réseau, et les objets d'application spécifiés par les fabricants. L'énergie intelligente Zigbee 2.0 La spécification définit un protocole de communication basé sur le protocole Internet pour la surveillance, contrôler, notifier, et automatiser la livraison et l'utilisation de l'énergie et de l'eau, dont le positionnement intérieur n'est qu'une caractéristique.
UWB
La technologie de radiofréquence UWB est un système de positionnement basé sur UWB. Il s'agit d'une technologie radio à courte portée, communications à large bande passante avec de fortes propriétés de résistance aux trajets multiples et un degré de perméabilité des matériaux de construction qui le rend adapté aux environnements intérieurs typiques où la ligne de visée est normalement hors de vue. en outre, une bande passante plus large signifie une résolution temporelle plus élevée. Cela permet de mesurer le temps de vol entre l'émetteur et le récepteur, résultant en de meilleures estimations de distance que RSS. Par conséquent, le système UWB utilise des mesures à trois couches pour évaluer la distance d'un ensemble d'au moins trois ancres déployées depuis l'environnement pour estimer la position d'étiquettes. La précision UWB est actuellement la meilleure parmi les IPS, avec une erreur d'environ 30-50 centimètres.
L'inconvénient d'UBW IPS est qu'il consomme une grande quantité de bande passante de fréquence et nécessite un déploiement spécial. Pour éviter les interférences entre d'autres signaux RF, il existe des restrictions légales qui autorisent les bandes entre 3,1 GHz et 10,6 GHz. La puissance du signal est limitée. Si le système a besoin d'une transmission de charge de données, la portée de travail doit être limitée à 100m.
Système à ultrasons
Ces systèmes reposent sur l'écholocation et mesurent la période de temps pendant laquelle le signal ultrasonore émis revient au récepteur. Par exemple, navigation acoustique et télémétrie (sonar) est utilisé pour localiser des objets sous-marins. Il utilise le temps de vol pour calculer la distance entre eux. Une fois qu'il y a trois distances disponibles au moins, vous pouvez calculer des emplacements avec trilatération.
Les systèmes à ultrasons ne sont pas assez couramment utilisés dans les applications. Le placement de plusieurs ancres et balises Bluetooth est requis. La précision peut atteindre sous-mètre. toutefois, les signaux ultrasonores ont tendance à être affectés par les interférences de matériaux solides tels que les bâtiments.
Lumière infrarouge
Cet IPS nécessite une ligne de vue sans entrave (LES) entre la balise et l'ancre. Il est considéré comme un détecteur de pièce très responsable. De nombreuses ancres doivent être installées pour un positionnement précis et peuvent rencontrer des difficultés en raison de la faible qualité des mesures d'intensité du signal nécessaires pour estimer l'emplacement à partir de plusieurs ancres. Les casques VR adoptent actuellement une approche similaire, utiliser plusieurs sources lumineuses et objets réfléchissants pour localiser avec précision les personnes dans une pièce.
IMU
Le système de positionnement intérieur IMU comprend une unité de mesure inertielle (IMU), qui utilise des capteurs tels que des accéléromètres, gyroscopes, et des magnétomètres pour suivre le mouvement des objets dans l'espace tridimensionnel.
La détermination de la direction du mouvement dépend des capteurs, qui peut fournir une évaluation du mouvement relatif de la position précédente. La combinaison de tous les signaux avec des algorithmes comme l'estime peut obtenir des informations.
L'utilisation d'ancres dans l'environnement n'est pas requise par l'IMU. toutefois, La précision de l'IMU n'est pas élevée car les systèmes introduits précédemment, ses erreurs s'accumulent avec le temps et atteignent l'ordre du mètre au bout de quelques secondes. Pour cette raison, IMU l'utilise souvent en combinaison avec d'autres technologies. en outre, la capacité de détection de mouvement peut être utilisée pour détecter si le participant qui porte l'étiquette s'est arrêté.
Différentes méthodes de positionnement en intérieur
Mettre en œuvre la technologie de localisation intérieure, vous pouvez avoir besoin de différentes méthodes de localisation avec différentes solutions matérielles et logicielles. Par conséquent, vous pouvez utiliser des étiquettes pour suivre les objets en mouvement, ou des balises si l'objet est immobile. Les balises sont généralement plus petites et plus légères que les balises; toutefois, ils ont tous une variété de configurations qui varient en prix et en complexité. Vous pouvez programmer l'appareil selon vos besoins.
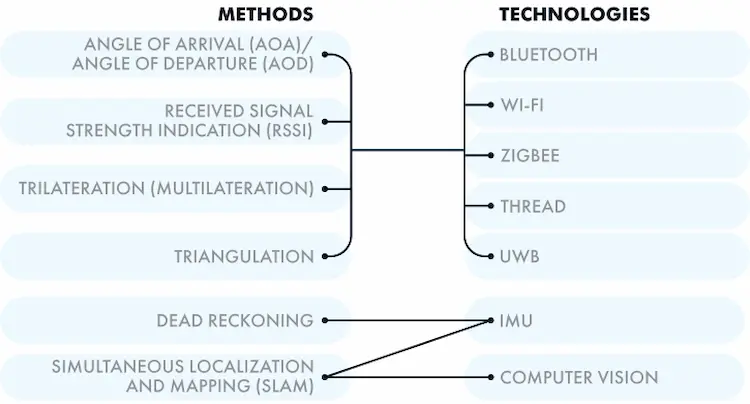
Selon le type et la technologie IPS, les méthodes de localisation peuvent être classées comme suit:
AoA/AoD
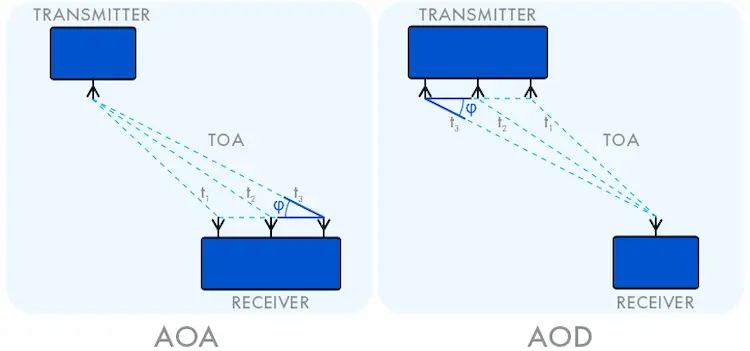
AoA et AoD calculent l'angle sous lequel le signal délivré par l'émetteur atteint l'appareil récepteur. Ils nécessitent plusieurs capteurs et nécessitent donc des coûts matériels supplémentaires, mais le bon point c'est qu'ils offrent une meilleure précision. AoA et AoD sont généralement implémentés dans les systèmes de positionnement qui utilisent Bluetooth.
RSSI
RSSI permet d'estimer la position d'un objet par la force du signal qu'il émet. Cette méthode est moins efficace en raison de l'impact négatif des objets fixes et mobiles autour de l'émetteur sur le signal. Il est populaire dans les réseaux sans fil, par exemple, Bluetooth, Wifi, Fil de discussion, et ZigBee.
Multilatération
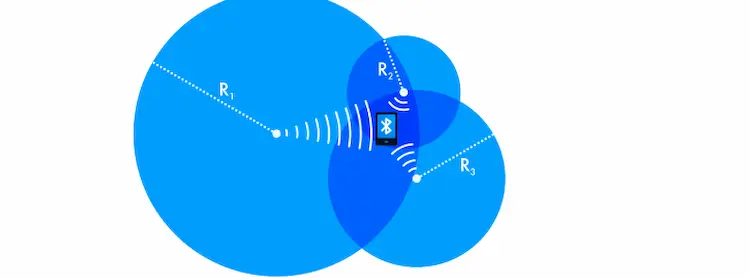
Cette méthode est applicable lorsque le réseau contient trois dispositifs de transport ou plus. Vous pouvez mesurer la distance à l'objet cible une fois que la distance entre certains objets de référence est obtenue. La méthode à trois couches implique une modélisation mathématique et est couramment utilisée pour améliorer la précision de positionnement du Wi-Fi, Bluetooth, ultrason, et UWB.
Triangulation
Ceci est une autre méthode basée sur le calcul mathématique. La triangulation mesure la distance à un objet en construisant des triangles entre des points de référence autour de lui. La triangulation est une méthode de localisation supplémentaire du Wi-Fi, Bluetooth, et systèmes UWB.
Dead Reckoning
Il s'agit d'une méthode de suivi de localisation intérieure courante utilisée par l'IMU pour détecter l'emplacement de la cible en combinant la position et la vitesse connues avec le calcul de la piste. Comme l'erreur de position s'accumule avec le temps, la précision de cette méthode n'est pas élevée.
CLAQUER
Les algorithmes SLAM utilisent les données des capteurs ou des caméras pour créer une carte de l'emplacement de la cible. L'IMU et les systèmes de vision par ordinateur utilisent cette méthode pour surveiller le mouvement et l'emplacement des objets.
Considérations qui influencent votre choix de technologie de système de positionnement intérieur
Pour déterminer quelle technologie convient à la construction de votre propre IPS, vous devez tenir compte de divers facteurs et les équilibrer en fonction des spécifications requises pour le projet.
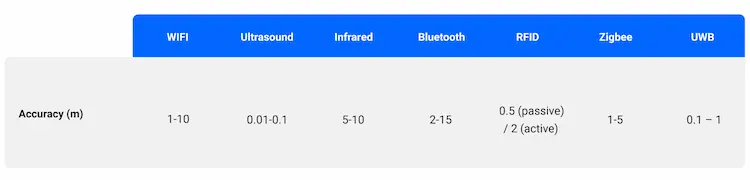
Précision:
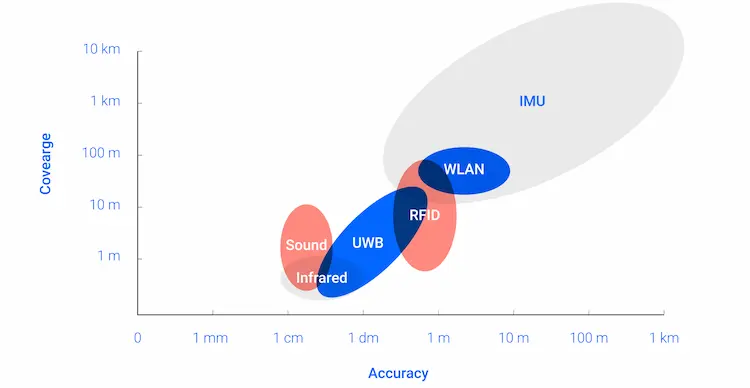
La précision est la principale caractéristique de la plupart des systèmes de cartographie d'intérieur. Une bonne solution nécessite souvent un déploiement flexible, ce qui ajoute du coût et de la complexité. Ainsi, lorsque le positionnement précis n'est pas un facteur clé, vous pouvez opter pour moins cher, techniques plus simples. Le tableau ci-dessous fournit la meilleure précision généralement obtenue par plusieurs systèmes de positionnement intérieur.
Couverture et extensibilité:
La couverture est la zone où les informations de localisation sont disponibles. Les techniques avec une plus grande couverture peuvent signifier moins de précision.
Adaptabilité:
Les modifications de l'environnement peuvent avoir un effet sur les performances du système. Par conséquent, quand la précision est requise, la capacité à faire face à ces changements est essentielle.
Facteur taux d'échantillonnage:
Le nombre de localisations obtenues par seconde est une autre caractéristique essentielle, en particulier pour les systèmes complexes nécessitant plus de puissance de calcul et d'énergie.
Coût:
Coût de déploiement, cout d'opération, et les coûts de maintenance pendant le cycle de vie du système doivent être pris en considération. Certaines technologies nécessitent une installation fixe, tandis que d'autres sont mobiles ou peuvent utiliser l'infrastructure existante. De telles techniques nécessitent souvent un étalonnage et consomment beaucoup de temps, ce qui entraîne plus de frais, surtout lorsque l'installation n'est pas permanente.
Pourquoi utiliser Bluetooth IPS
Les versions antérieures de la technologie de localisation intérieure Bluetooth permettaient de l'utiliser comme solution de proximité basée sur l'approche RSSI, soutenue par une approche à trois niveaux. La précision de positionnement varie de 1 mètre à plusieurs mètres. L'introduction de la technologie BLE dans 2010 version 4.0 en fait une solution à faible consommation d'énergie. Plusieurs de ses avantages incluent:
- Faible consommation d'énergie et faible coût
Cette caractéristique en fait une norme RF idéale pour une utilisation dans les balises, Capteurs BLE, et étiquettes d'actif ou de personnel. - Déploiement facile
Le déploiement facile et les options matérielles flexibles peuvent être sur ou indépendamment du réseau et facilement intégrés dans l'écosystème Bluetooth. - Technologie extensible
Étendre la technologie à plusieurs cas d'utilisation sensibles à la localisation — de la détection d'appareil Bluetooth, suivi des actifs, emplacement intérieur, et l'orientation vers les services de proximité, etc.
Heures supplémentaires, la technologie a gagné de nouvelles mises à jour. Dans 2017, Bluetooth 5 créé des réseaux maillés hautement évolutifs qui fournissent une communication plusieurs à plusieurs non hiérarchique. Les réseaux maillés peuvent être intégrés dans les systèmes de positionnement intérieur pour étendre leurs fonctions et améliorer la précision du positionnement. La sortie de la version 5.1 dans 2019 ouvre plus d'opportunités pour les services de localisation Bluetooth. En plus du RSSI, la nouvelle capacité de radiogoniométrie permet au système d'utiliser le support de triangulation AoD et AoA et de détecter les positions cibles avec une plus grande précision. Par conséquent, Bluetooth 5.1 ouvre la porte à un large éventail d'applications de la technologie dans les solutions IPS et RTLS en plus des solutions adjacentes.
Bluetooth IPS a des atouts évidents par rapport aux autres solutions radio. Première, Le système de positionnement intérieur Bluetooth est très économe en énergie, qui assure la longue durée de vie des systèmes sans fil. Deuxièmement, sa nouvelle version offre une technologie de positionnement avancée et améliore la précision jusqu'au niveau centimétrique.
Le Bluetooth est partout. Selon la mise à jour du marché Bluetooth 2020, les expéditions annuelles d'appareils de service basés sur la localisation Bluetooth sont passées de 4 millions d'unités en 2015 à 186 millions d'unités en 2020. Ce nombre devrait atteindre 538 millions d'ici 2024.BLE se trouve dans la plupart des puces et est préinstallé dans la plupart des appareils mobiles modernes tels que les smartphones. Cela simplifie grandement le déploiement et la mise en œuvre de la technologie.
Vous trouverez ci-dessous une liste des différences entre Bluetooth et d'autres paramètres de technologie RF afin que vous puissiez déterminer celui qui vous convient en fonction de vos besoins..

Comment fonctionne le système de positionnement intérieur Bluetooth?
La solution BLE IPS utilise des balises ou des capteurs pour localiser et détecter les appareils Bluetooth en transmission tels que les étiquettes de piste, et smartphones dans un espace intérieur. Les données de localisation obtenues à partir de capteurs ou envoyées à partir de balises vers des appareils mobiles sont ensuite absorbées par diverses applications basées sur la localisation et traduites en informations qui prennent en charge plusieurs cas d'utilisation sensibles à la localisation..
Positionnement BLE avec capteurs
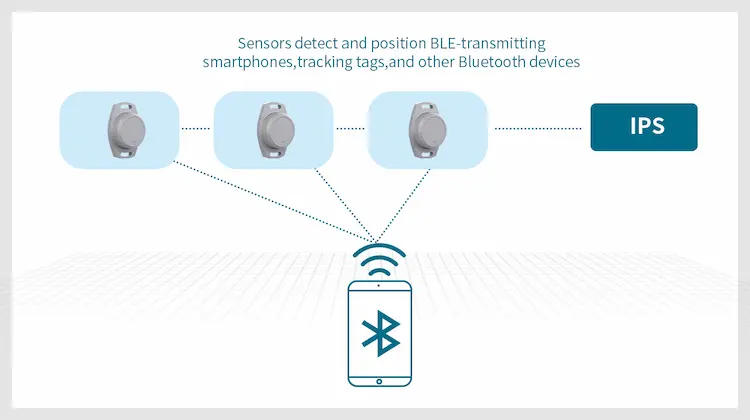
Le positionnement du capteur BLE utilise Capteurs BLE déployé dans des positions fixes autour de l'espace intérieur. Les capteurs localisent et détectent passivement les transmissions des smartphones BLE, balises de suivi des ressources, balises, portable, badges de localisation du personnel, et d'autres appareils Bluetooth en fonction de la force du signal de l'appareil de transmission qu'ils reçoivent. Les données de localisation sont ensuite transmises à un IPS ou RTLS central. Le moteur de positionnement analyse les données et utilise plusieurs algorithmes pour déterminer la position de l'émetteur. Ces coordonnées peuvent être utilisées pour visualiser la position sur une carte intérieure de votre espace, ou à d'autres fins, en fonction de l'application de localisation spécifique.
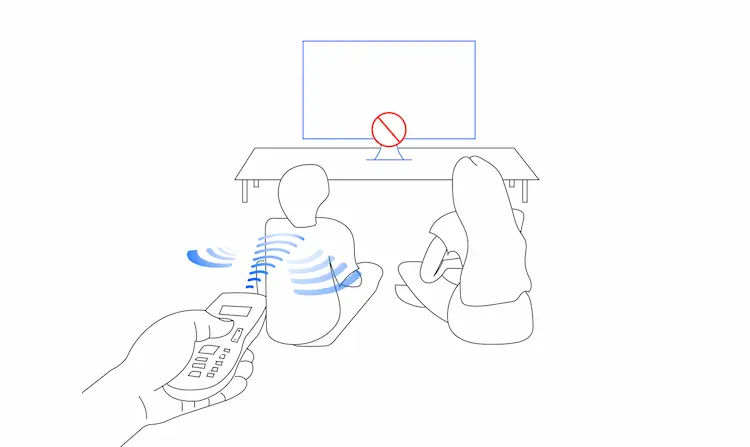
Positionnement BLE avec balises
![]()
La balise de basse altitude a signalé à plusieurs reprises une basse altitude. Les signaux sont détectés par des appareils autour, tels que les capteurs et les smartphones compatibles BLE. Déployé à des endroits fixes dans tout l'espace intérieur, la balise diffuse en continu des signaux contenant son identifiant unique. Ce code d'identification est envoyé périodiquement avec d'autres données en fonction du protocole de communication de la balise choisi. Un appareil sans fil activé avec un service préconfiguré ou une application dédiée recevra des signaux d'une balise ou fournira ces informations à un serveur de manière centrée sur le serveur dans la portée de la balise. La détection entre les appareils et les balises peut activer un service de localisation basé sur la proximité qui détermine si les balises et les appareils sont à portée les uns des autres. La communication entre des appareils sans fil ou trois balises ou plus peut être utilisée pour passer le dispositif de positionnement multinational RSSI en plaçant stratégiquement plusieurs balises dans l'espace intérieur. L'emplacement de l'appareil identifié peut déclencher des actions spécifiques ou être utilisé pour une variété d'applications ou de services en fonction de l'application. Vous pouvez également déployer une balise sur des objets en mouvement et les localiser par des capteurs Bluetooth fixes.
Cas d'utilisation du positionnement intérieur Bluetooth
Il existe plusieurs solutions prenant en charge Bluetooth IPS.
Suivi des actifs
Les organisations de nombreux secteurs peuvent utiliser des systèmes de localisation intérieure Bluetooth pour suivre l'emplacement et l'état en temps réel des actifs et équipements critiques.
- Espace entreprise: Améliorez l'allocation des ressources et de la productivité en créant une image claire des équipements et des ressources dans les campus et les installations des grandes entreprises
- Soins de santé: Localisez et suivez rapidement l'emplacement des équipements critiques tels que les fauteuils roulants et les ventilateurs en ajoutant des capacités de suivi des actifs
- Fabrication intelligente: Crée une visibilité sur l'emplacement et le mouvement des appareils, Machines, et ressources
- Gestion d'entrepôt: Combine le suivi des actifs pour localiser les outils, inventaire, et équipements dans les grandes installations
Suivi du personnel et du personnel
Les organisations peuvent utiliser des capteurs, Balises BLE, et des étiquettes de personnes pour créer une visibilité sur les emplacements des employés et des personnes.
- Détection de périphérique sans fil: Les installations soucieuses de la sécurité telles que les bâtiments d'entreprise et le gouvernement peuvent utiliser des capteurs pour détecter le BLE et d'autres appareils émettant des RF dans leurs espaces intérieurs
- Optimisation du lieu de travail: Augmentez la productivité et l'efficacité opérationnelle en utilisant des balises à faible coût telles que les badges des employés pour donner une visibilité sur l'utilisation de l'espace et où les employés se trouvent dans votre espace.
- Sécurité des employés: Créez des espaces intérieurs plus sûrs en localisant ou en avertissant rapidement les employés en cas d'urgence ou d'évacuation.
- Préparation au lieu de travail: Soutenir les exigences réglementaires et les protocoles pour aider à prévenir et à atténuer la propagation des maladies dans leur espace, utiliser des outils pour permettre des conseils d'hygiène efficaces, recherche des contacts, sensibilisation au respect de la distanciation physique, etc.
Service de localisation
En utilisant le positionnement intérieur BLE, les organisations peuvent créer des bâtiments intelligents qui utilisent l'emplacement pour faciliter une variété d'interactions, Messagerie, et autres fonctions.
- Messagerie de proximité: Améliorez les expériences client attrayantes en identifiant les destinations proches des actifs et des utilisateurs, et utiliser ces données pour engager directement les visiteurs avec un contenu hyper-local tel que des points d'intérêt à proximité des campagnes de marketing par coupons
- Géo-clôture: Créez des limites géographiques virtuelles autour de différentes zones de l'espace intérieur qui déclenchent des actions spécifiques lorsque l'utilisateur entre, sorties, ou réside dans une zone déterminée
- Partage de position: Permet aux utilisateurs de choisir de partager où ils vivent, ou pour localiser d'autres personnes, y compris les membres de la famille, amis, ou collègues, dans les grands bâtiments
Navigation intérieure
Le système de navigation intérieure et de recherche de chemin via la localisation Bluetooth rend l'espace instantanément familier et explorable.
- Navigation intérieure: Améliorez les expériences intérieures pour des industries telles que le transport hôtelier au détail, soins de santé en entreprise, etc.
- Navigation point bleu: Avec les balises BLE et autres technologies de localisation indoor, les organisations peuvent utiliser l'expérience du point bleu pour la navigation tour par tour et la recherche de chemin
Entreprise intelligente
L'IPS Bluetooth peut être utilisé pour obtenir des données de localisation qui peuvent être traduites en informations commerciales étonnantes. Il localise et surveille le mouvement des personnes, actif, et l'équipement, puis analyser les données. Votre division commerciale peut être plus intelligente et mieux informée en créant des visualisations de la façon dont les visiteurs interagissent avec les espaces intérieurs.
Comment mettre en œuvre la localisation intérieure Bluetooth
La mise en œuvre de projets de localisation intérieure Bluetooth à faible consommation d'énergie dépendra de vos spécifications, budget, et capacités techniques. La première chose que vous devez décider est de créer IPS à partir de zéro ou de l'intégrer dans une solution existante. Le choix de votre méthode de positionnement en dépend.
Si votre version Bluetooth est inférieure à 5.1, alors RSSI plus trioxyde est votre seule option. Cette approche s'applique aux solutions adjacentes destinées aux fins suivantes:
- Partage d'informations;
- Localisation des points d'intérêt et des objets;
- Amélioration des services.
Dans un de nos projets, un grand centre commercial a appliqué notre Solutions de positionnement intérieur BLE. Les propriétaires d'entreprise l'utilisent pour le marketing, comme informer les visiteurs des réductions et des offres promotionnelles. Le client nous a demandé de créer un IPS avec une balise BLE pouvant communiquer avec les applications mobiles via Bluetooth 4.0. Une fois l'emplacement de l'utilisateur de l'application déterminé, le système peut leur fournir des informations pertinentes.
Un SDK mobile qui lit les signaux des émetteurs et envoie des données de balise au cloud est créé et vous est fourni. Pour prendre en charge les mesures RSSI, la trilatération est utilisée pour calculer l'emplacement des utilisateurs de l'application. Par conséquent, la précision de positionnement peut atteindre 1 mètre.
Les calculs de localisation peuvent être effectués dans une application ou sur un serveur cloud. Les appareils mobiles exécutent cette fonction lorsque la connexion réseau est instable ou indisponible. C'est ardu, mais il n'est pas nécessaire que vous déployiez toujours le serveur et que vous vous y connectiez. Si vous souhaitez créer des applications légères à faible consommation d'énergie, alors vous pouvez exécuter l'estimation sur le serveur.
Le nombre de balises que vous avez installées dans l'appareil est également une caractéristique qui affecte la précision du positionnement. Par conséquent, bien localiser la cible, il faut s'assurer que la densité de balises est suffisamment élevée. Notre IPS Bluetooth prend en charge d'innombrables balises à une densité d'au moins 3-4 appareils par 200m².
Nous avons utilisé le protocole iBeacon pour la localisation intérieure Bluetooth Beacon, d'autres protocoles tels que AltBeacon et Eddystone de Google peuvent également être pris en charge. Nous avons mis en place un suivi de localisation à l'intérieur avec des balises de proximité Bluetooth. Nous avons ajouté de nouvelles fonctionnalités, durée de vie prolongée de la batterie de la balise, et amélioré l'efficacité du système en personnalisant les balises. Si votre système prend en charge la dernière version de la spécification Bluetooth, alors AoA et AoD peuvent être votre option pour un positionnement précis dans le déploiement des services de localisation Bluetooth, tels que la recherche de chemin et la localisation ou la piste en temps réel.
Quant à AoD, les signaux provenant de plusieurs antennes à un émetteur ont été lus par un récepteur avec une seule antenne. Chaque signal atteint un certain angle avec un certain ToA. Nous pouvons mesurer l'AoD et la distance entre l'émetteur et le récepteur en connaissant la distance entre les antennes de l'émetteur et l'intervalle de temps entre les signaux.
Le principe de fonctionnement de la méthode AoA est similaire, mais c'est à l'envers: un émetteur envoie des signaux d'une antenne à plusieurs antennes du dispositif de réception.
Si le réseau contient plusieurs appareils, la triangulation peut être utilisée comme méthode de positionnement auxiliaire pour améliorer la précision. Pour minimiser l'imprécision des calculs de position, des algorithmes de filtrage tels que le filtrage de Kalman peuvent être utilisés pour recouper les données.
Comme avec n'importe quel IPS, l'utilisation de Bluetooth pour les emplacements intérieurs n'est pas une solution parfaite, car il peut être semé d'erreurs et de défis. Le plus grand défi de Bluetooth IPS est de détecter des signaux dans des environnements bruyants. Le déploiement d'un système de localisation local dans un environnement statique est plus facile. Si Bluetooth IPS fonctionne dans une installation ou une pièce remplie d'objets en mouvement, il est beaucoup plus difficile de maintenir l'intégrité du signal et de localiser correctement les objets. Cela peut être amélioré en augmentant le nombre de balises par mètre carré dans l'installation.
Pour vous assurer que votre système de localisation intérieure basé sur BLE fonctionne correctement, vous devez créer une carte détaillée de l'emplacement où vous prévoyez de déployer le système.
Conclusion
Bluetooth est une technologie IPS largement utilisée qui offre une stabilité de connexion avec une consommation d'énergie minimale. Si vous souhaitez vous assurer qu'un BLE IPS est une technologie adaptée à votre projet, n'hésitez pas à nous contacter. Nous avons une vaste expérience dans la construction de SDKS, personnaliser les balises, Applications mobiles, plates-formes cloud, et autres solutions nécessaires au déploiement des services de localisation.