La búsqueda de direcciones es la práctica de conocer la dirección de transmisión de una señal recibida.. Soporta todo en un sistema., desde el seguimiento de la vida silvestre hasta la aviación y la navegación náutica. Bluetooth agregó la nueva especificación central de búsqueda de dirección opcional en su último Bluetooth 5.1. Esta nueva función permite que los dispositivos Bluetooth conozcan la dirección de cualquier señal transmitida desde otro dispositivo Bluetooth.. También es capaz y puede mejorar radicalmente las soluciones de servicios de ubicación de Bluetooth.. La función de radiogoniometría admite dos técnicas. Estas técnicas son; el Bluetooth AoA (ángulo de llegada) y el Bluetooth AoD (ángulo de salida).
En MOKOBlue, creamos y proporcionamos múltiples Balizas Bluetooth que admiten las nuevas funciones de búsqueda de direcciones de Bluetooth con diseños diversificados para el desarrollo independiente. Nuestro equipo se dedica a desarrollar y personalizar varios diseños de hardware y software según las necesidades del cliente..
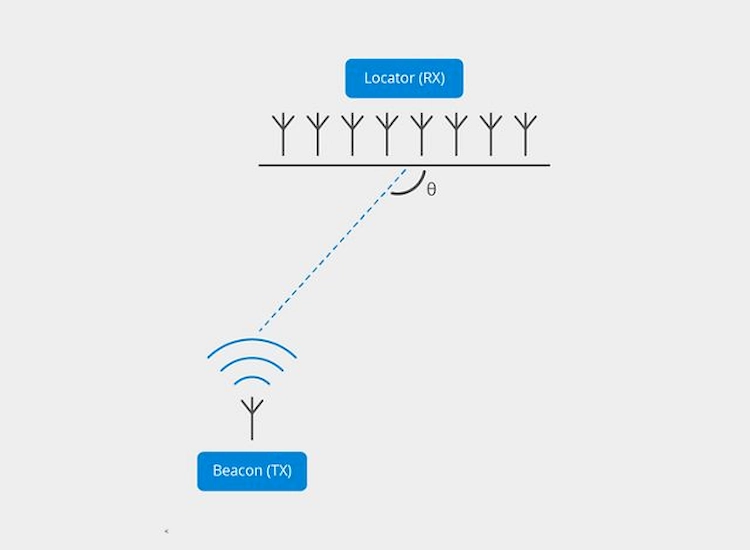
El principio de funcionamiento del ángulo de llegada y el ángulo de salida
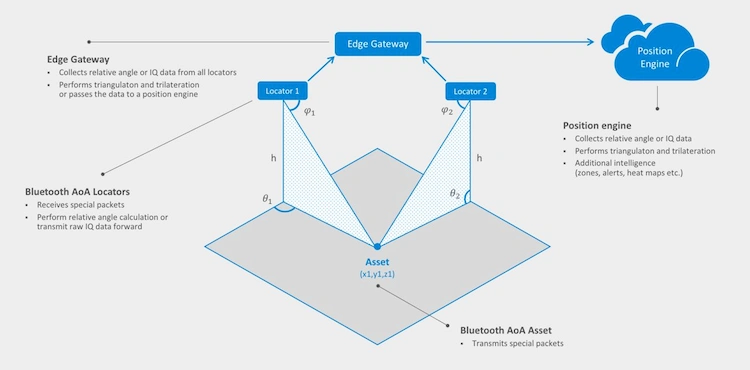
Ángulo de llegada (AoA)
- Un activo transmite(TX) su ubicación a un AoA locador, como un punto de acceso inalámbrico (AP), luz conectada, o lámpara inteligente
- El localizador mide el Angulo de llegada de la señal
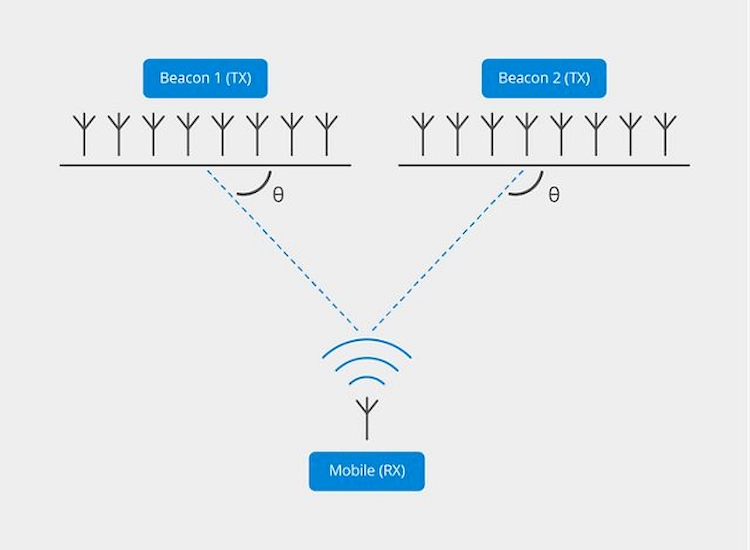
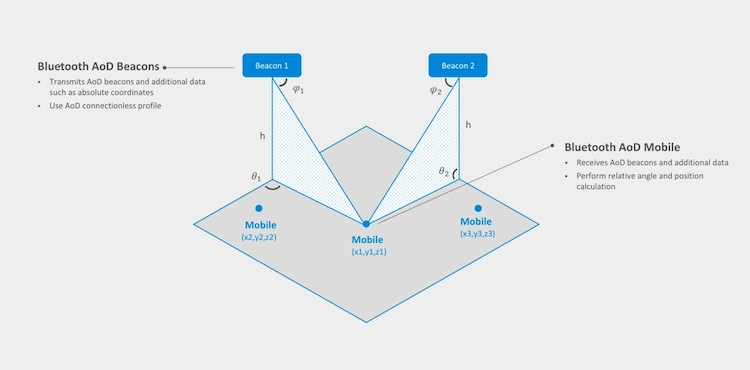
Ángulo de salida(AOD)
- Las balizas transmiten información AoD, como coordenadas, a través de múltiples antenas
- Dispositivos móviles, incluyendo teléfonos inteligentes, recibir las balizas y calcular su ubicación
Consideraciones de diseño de Bluetooth AoA (Ángulo de llegada)
• Solo se requiere una sola antena. Puede ser de baja potencia y, al mismo tiempo, es compatible con otras funciones de BLE
• Solamente 4 X 4 o 3 X 3 Los localizadores necesitan interruptores y rayos de antena.
• Todas las lecturas de ángulo son procesadas por Bluetooth AoA pasarelas. También determinan la ubicación del dispositivo comunicándose con un sistema de gestión de activos en la nube
Consideraciones de diseño de Bluetooth AoD (Ángulo de salida)
• Solamente 4 X 4 o 3 X 3 las balizas necesitan interruptores y rayos de antena
• Los algoritmos AoD deben ser compatibles con dispositivos como teléfonos inteligentes
• El sistema de servicios de ubicación debe estar familiarizado con las coordenadas de la baliza
Soluciones de la nueva función de radiogoniometría Bluetooth
Además de las aplicaciones de posicionamiento y proximidad clave, la función de radiogoniometría Bluetooth también tiene otras soluciones. Incluyen;
Soluciones de búsqueda de artículos
En la experiencia del usuario, las soluciones de búsqueda de artículos experimentan un bache considerable. Cuando los vendedores de teléfonos inteligentes incorporan una función de radiogoniometría Bluetooth AoA en sus teléfonos, Las soluciones de búsqueda de artículos pueden controlar los datos direccionales.. Esto implica que no solo podrán determinar la cercanía de un artículo extraviado, pero también sabrán su ubicación exacta. Por lo tanto, la función de radiogoniometría Bluetooth elimina el requisito de suposición al buscar objetos perdidos.
Soluciones RTLS
Las soluciones RTLS pueden implementar la función de búsqueda de dirección para mejorar la precisión de Bluetooth AoA de una ubicación hasta el nivel de un centímetro cuando se implementa en el entorno adecuado.. RTLS con una función de búsqueda de dirección permite que una fábrica rastree fácilmente la posición y el flujo de materiales con mayor precisión. es más, también alerta a los empleados cada vez que se acercan a zonas de trabajo peligrosas.
Soluciones de información de puntos de interés
Cuando se agrega la función de radiogoniometría Bluetooth AoA a los teléfonos inteligentes, las soluciones de información de puntos de interés se benefician principalmente de esto. Por ejemplo, varias exhibiciones con balizas asociadas en un museo pueden usar la aplicación de información de PdI. Los usuarios pueden acceder a la aplicación de información de PdI desde sus teléfonos inteligentes y conocer todas las exhibiciones disponibles en una sala. La aplicación permite al usuario seleccionar la exhibición más oportuna para recibir información adicional sobre esa exhibición en particular.. Los usuarios pueden usar el soporte de búsqueda de direcciones para adquirir más información sobre un artículo en particular simplemente apuntando sus teléfonos inteligentes a esa exhibición específica.
Soluciones IPS
La función de búsqueda de dirección también se aplica en soluciones IPS. Por ejemplo, en sistemas de posicionamiento, la nueva función de dirección de Bluetooth se puede usar para guiar a los fanáticos en un gran estadio directamente en sus asientos. Las soluciones IPS con la función de radiogoniometría requieren menos balizas de localización para obtener una mayor precisión. Esto aporta una eficacia adicional a las implementaciones.. es más, la precisión lograda proporciona información incremental y una comprensión de la interacción entre el consumidor y el producto.
Bluetooth 5.1 Teoría de realización del servicio de ubicación AoA
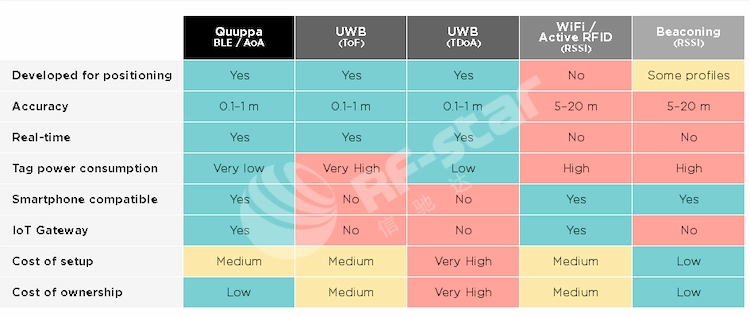
Resumen de la tecnología de posicionamiento en interiores
El posicionamiento interior tiene varias soluciones. Incluyen; UWB, Wifi, baliza BLE, y BLE AoA. UWB tiene un rango de precisión de 0,1 m a 1 m, mientras que las balizas Wi-Fi y BLE tienen un error mayor. Su rango de precisión es de 5 m a 20 m..
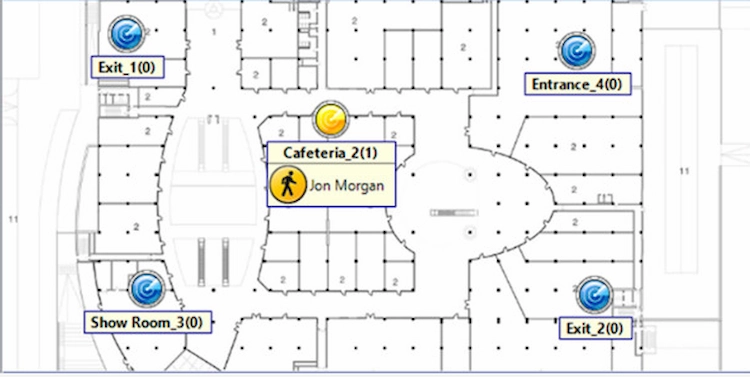
Análisis de la teoría del posicionamiento en interiores
El sistema de posicionamiento interior dibuja el modelado arquitectónico de una escena real., configura el enrutador receptor en la ubicación interior, y marca la posición coincidente en el mapa de modelado. Todas las señales inalámbricas se transmiten a través de un teléfono inteligente o un módulo de baliza. Después de recibir las señales inalámbricas, el enrutador receptor instalado en un punto fijo autentica el rango de área de posición de la baliza.
Después de confirmar su rango de área de posición, varias antenas pueden medir el ángulo de llegada de la señal de la baliza. Esto se puede calcular combinando la posición precisa de la baliza y el posicionamiento de triangulación.
Triangulación
La triangulación se refiere a medir la posición de una baliza utilizando dos conjuntos de datos AoA. Los datos de un AoA se pueden medir usando dos conjuntos de antenas. Por otro lado, la posición de un dispositivo se puede medir utilizando dos conjuntos de datos AoA.
Teoría de la Medida
Frecuencia
La banda ISM en dispositivos Bluetooth comienza desde 2.40 GHz a 2.41 GHz. Bluetooth tiene 3 canales de difusión que incluyen 37, 38, y 39. En las especificaciones básicas de Bluetooth v5.x, la extensa transmisión Bluetooth Low Energy se puede transmitir en cualquier canal desde 0 a 39. Por lo tanto, todas las balizas con versión Bluetooth 5.1 puede funcionar efectivamente en cualquier canal de Bluetooth.
Fase
Todas las señales inalámbricas son continuas en el aire.. En el rango de frecuencia, el receptor RX invierte la modulación y recoge la señal de un ciclo de onda de 0~2π.
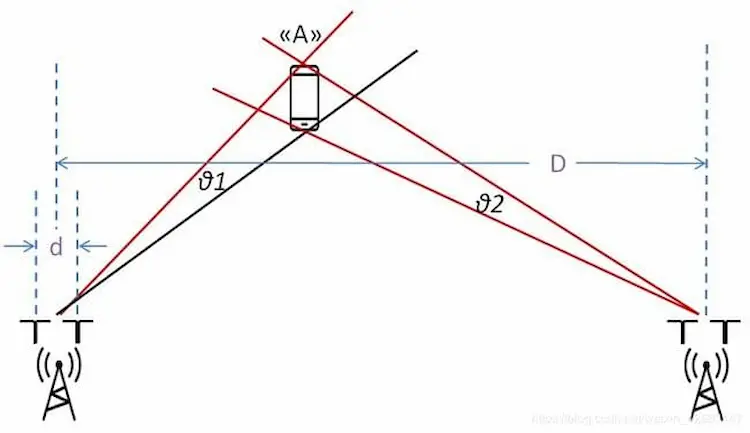
Cálculo del AoA
Imagínese cuando una señal de baliza BLE de frecuencia fija se transmite en un espacio abierto. El RX recibe una diferencia de fase nula cuando los receptores están en el mismo radio y TX finaliza durante un tiempo determinado. a pesar de eso, se adquiere un receptor de fase cuando el receptor RX está en una posición con un radio incompatible, durante un tiempo determinado.
Error de medición de AoA
Hay dos ángulos de un plano bidimensional., pero hay una trayectoria circular con un radio de α en coordenadas tridimensionales reales. Aunque el receptor AoA conoce la señal de una baliza cuando está en la trayectoria del círculo, no puede determinar si están en el círculo o no. Durante este tiempo, el punto de ubicación de coordenadas de la baliza se confirma mediante un conjunto de antenas ortogonales.
Los conjuntos de antenas se configuran a través del posicionamiento y reduciendo la cantidad de receptores desplegados. A continuación se muestra una ilustración de la implementación de conjuntos de antenas estándar con un kit de desarrollo Bluetooth AOA.
Despliegue de Software AoA en Bluetooth 5.1
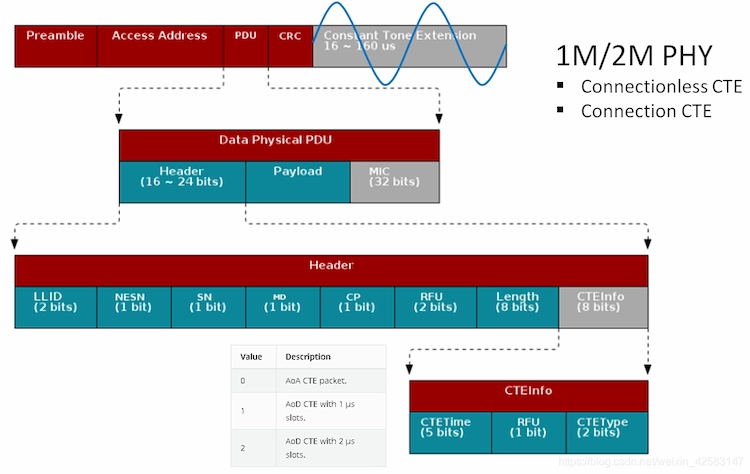
Bluetooth 5.1 se desarrolla con especificaciones de protocolo AoA en la capa de enlace lógico. El Ángulo de llegada y el Ángulo de salida pueden admitir los modos de transmisión y conexión y funcionan con un PHY regular de 1M o 2M. Los siguientes son los requisitos del formato de transmisión de datos
• Un paquete de datos de PDU tiene especificaciones AoA/AoD estandarizadas
• El CTE es la extensión del paquete de datos AoA/AoD, y su periodo es 16 ms- 160 ms.
• La modulación de la señal de 250 kHz está disponible en una onda portadora sin validación y blanqueamiento CRC.
• El receptor RX utiliza una señal para calcular la diferencia de fase y muestrear el valor I/Q de la señal en un momento específico.
Desafíos de los diseños Bluetooth AoA
Interferencia de reflexión de señal
El receptor RX en un escenario real recibe su señal de reflexión o la de otros Ángulos de Llegada y señales de baliza. es más, Los paquetes de datos extendidos por CTE son transportados por la señal de reflexión, aunque primero se deben eliminar las señales de ruido..
Tiempo de conmutación de compensación
Varias antenas TF están controladas por el núcleo de RF. Aparte del tiempo de transmisión de la señal en el aire, el tiempo de conmutación de RF siempre debe ser compensado.
Error de valor de ángulo
Se requiere un algoritmo para minimizar el error ya que las medidas deben tener un error. Principalmente, el rango de error está entre 3% ~ 5%.
Consejos para maximizar la precisión de Bluetooth AoA
Ángulo de llegada de Bluetooth (AoA) calcula el acimut y los ángulos de elevación de la baliza utilizando la diferencia de fase de una señal que llega a varias antenas. Los aspectos físicos y el proceso de transmisión de señales afectan la precisión de AoA. Esta precisión varía desde unos pocos centímetros hasta alrededor de un metro..
Algunas de las estrategias para maximizar la precisión de Bluetooth AoA son;
a) Mantenga siempre los objetos metálicos lejos de los localizadores.. Se puede lograr una mayor precisión agregando cajas encima de los localizadores. Esto se hace para mantener alejados los objetos metálicos cerca de los localizadores..
B) Organizar los localizadores a cada lado de una baliza. Es esencial tener localizadores espaciados uniformemente alrededor de todos los lados de la baliza.. Se observa poca precisión cuando hay un gran ángulo entre la baliza y el localizador..
C) La mejor precisión se logra cuando la baliza y el localizador están cerca. Siempre deje caer los localizadores con techos altos para obtener una mejor precisión. también, Recuerde no dejar caer los localizadores demasiado, ya que se puede obtener poca precisión cuando hay un gran ángulo entre el localizador y la baliza..
D) entre los x, Y, y ubicaciones Z, la peor precisión se obtiene en el eje Z, ya que todos los localizadores suelen colocarse a alturas similares.
mi) Se logra una mayor precisión cuando existe una línea de visión entre el localizador y la baliza. Considere colocar balizas encima de elementos como cargas de palés y localizadores en el techo o techo para crear una línea de visión entre los dos..
F) Agregue localizadores adicionales en la ubicación exacta para crear más ángulos de ubicación. Estos ángulos de ubicación se pueden usar para calcular una precisión mejorada de la posición de la baliza.
gramo) También puede filtrar a lo largo del tiempo para promediar más datos. Esto se puede lograr sin estresar el motor de ubicación., aunque se aumenta la latencia al recibir actualizaciones de la ubicación.
h) La variación en la precisión depende de la orientación de una baliza. En escenarios controlados, puede considerar organizar y fijar la orientación de una baliza para mejorar la precisión en una dirección específica.
I) Es esencial contar con una medición precisa del sitio y del anclaje; se obtiene poca precisión debido a mediciones iniciales inexactas..
Ventajas de las tecnologías de posicionamiento Bluetooth AoA de MOKOBlue
• Tienen una precisión promedio de entre 0.1 a 0.5 metros
• Mejoran la precisión de 5 metros del Bluetooth inicial de baja precisión en casi 10 veces
• Tienen una alta frecuencia de actualización
• Estas tecnologías admiten la versión de Bluetooth 5.1
• Son compatibles con varias etiquetas Bluetooth como balizas, smartphones, relojes, esposas, y muchos otros
• Consumen poca energía
• Tienen las capacidades de transmisión de enlace descendente y anclaje de IoT
Características del producto de balizas MOKOBlue
1. SoC de la serie Nordic nRF52
2. Compatible con la versión de Bluetooth 4.2
3. Compatible con la versión de Bluetooth 5
4. Compatible con Google Eddystone y Apple iBeacon
5. Disponible para Arduino Bluetooth iOS
6. Tiene configuraciones únicas de SDK y APP
Algunas de las balizas Bluetooth disponibles en MOKOBlue son;
a) Baliza con sensor de luz H6: está ensamblada con una estructura de soldadura ultrasónica y es compatible con la versión estándar de Bluetooth 4.2. además, está integrado con un acelerómetro de 3 ejes y sensores de luz. La baliza con sensor de luz H6 es la más ideal para soluciones de información de puntos de interés.
B) Baliza de pulsera Bluetooth W6: esta baliza de pulsera Bluetooth es compatible con la versión estándar de Bluetooth 5.1. Está especialmente diseñado para casos de uso como soluciones de búsqueda de artículos., gestión de flujo, etc.
C) Baliza de casco H7: es una baliza BLE duradera con un alto nivel de impermeabilidad de IP67. La baliza es a prueba de golpes y resistente a altas temperaturas.. Por eso, es una aplicación eficaz para las soluciones RTLS, ya que puede funcionar en entornos hostiles, tales como almacenes, suerte, túneles, sitios de construcción, y más.
D) M1 Coin Beacon Tag: es un hardware de etiqueta de baliza Bluetooth pequeño y portátil que pesa 5.4 gramos. es más, está construido con un sensor de acelerómetro de 3 ejes opcional que le permite analizar el comportamiento del usuario. La etiqueta de baliza de monedas M1 es la mejor opción para las soluciones IPS.